Grid Pathfinding → GPS Navigation
Why Heuristic Search?
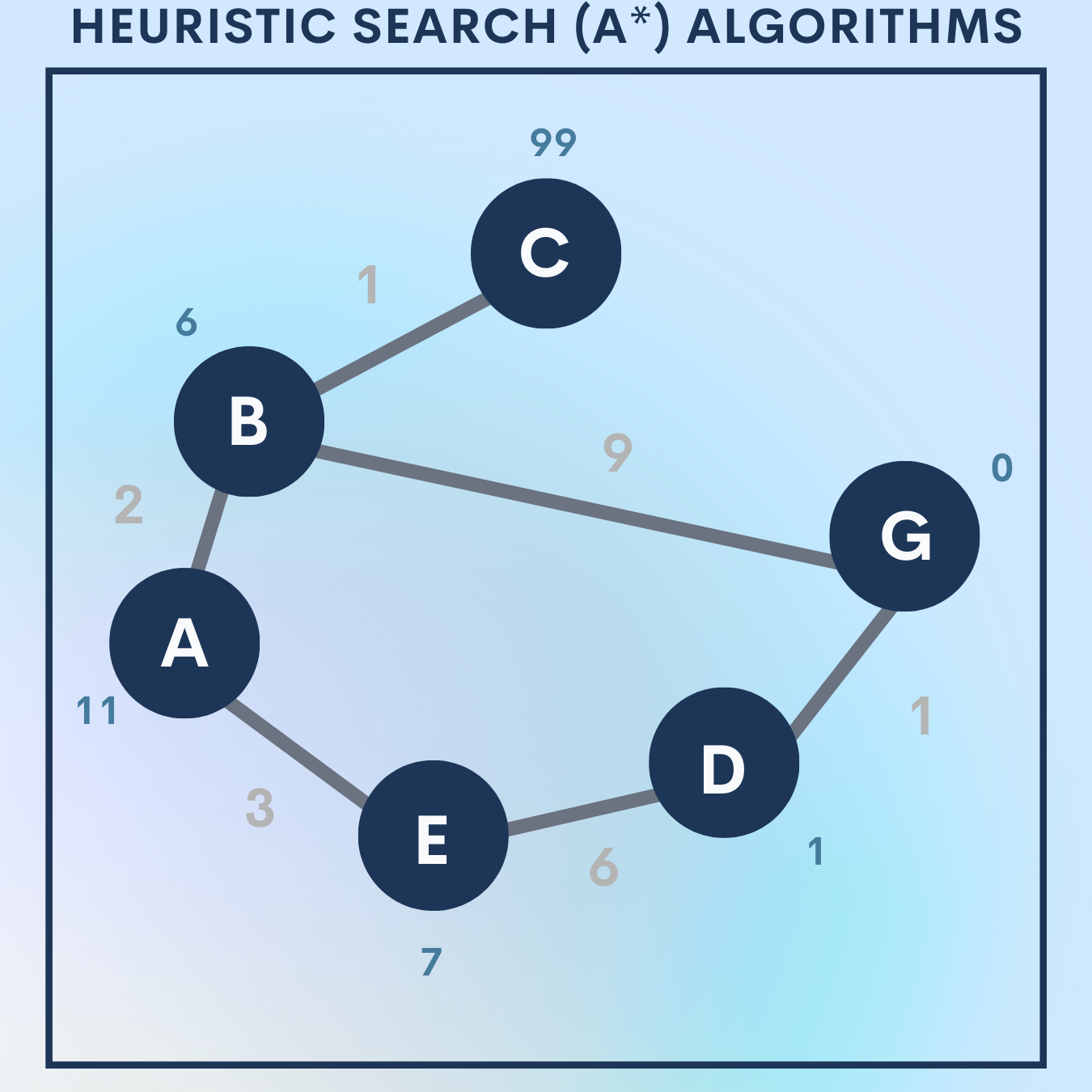
When you ask a maps app for the fastest route, it can’t try every possible path—there are too many. A* (pronounced “A-star”) narrows the search by combining what you’ve already spent (distance so far) with a smart guess of what’s left. It’s fast, optimal (with the right heuristic), and widely used in games, robotics, and GPS navigation.
- You’ll build two working demos: (1) a grid pathfinder with obstacles; (2) a mini GPS-like route finder on a small road network.
- You’ll learn how admissible/consistent heuristics guide A* to the goal without missing the optimal route, how to structure open/closed sets, and how to tune tie-breaking.
Theory Deep Dive
1. A* in one line
A* evaluates nodes using a combined score:
where 




2. Relationship to Dijkstra and Greedy Best-First Search
Dijkstra’s Algorithm: set 
Greedy Best-First Search: set 
A* blends both: balances progress-so-far and goal-directed guidance.
3. Admissibility and Optimality
A heuristic 
With an admissible heuristic on graphs with nonnegative edge costs, A* is optimal: the first time the goal is popped from the open set, the path found has minimal cost.
4. Consistency (Monotonicity)
A heuristic is consistent if for every edge 

Equivalently, the

5. Heuristics you’ll use
- Manhattan distance (4-connected grid):
- Euclidean distance (continuous/8-connected):
- Octile distance (8-connected with diagonal cost
):
where
- Great-circle (Haversine) for geo-coordinates.



Choose the heuristic to be admissible and as tight as possible—tighter heuristics explore fewer nodes.
6. Complexity and effective branching factor
Worst-case time and space can be exponential in depth 
where 

7. Practical engineering notes
Open set: a min-priority queue keyed by 
Closed set: nodes already expanded (final 
Tie-breaking: when
Weighted A*: 

Variants: IDA* (memory-lean), D* Lite (dynamic environments), Theta* (any-angle), Jump Point Search (grid acceleration).
Toy Problem – Grid Pathfinding
We’ll solve shortest paths on a 2D grid with obstacles. Movements allowed: 8-directional (N, NE, E, SE, S, SW, W, NW). Costs: 1 for orthogonal,
Dataset Snapshot (Representation)
Represent the grid as a matrix: 0 = free, 1 = obstacle. Example (10×10):
S 0 0 0 0 0 0 0 1 0
0 1 1 0 0 0 0 0 1 0
0 0 0 0 1 0 1 0 0 0
0 1 0 0 1 0 0 0 1 0
0 1 0 0 0 0 1 0 0 0
0 0 0 1 1 0 0 0 0 0
0 1 0 0 0 0 1 1 1 0
0 0 0 0 1 0 0 0 0 0
1 1 0 0 0 1 0 1 0 0
0 0 0 1 0 0 0 0 0 G
Here S is start, G is goal.
Step 1: Imports and helpers
Minimal standard-library imports; we’ll also define a small tie-break counter.
import heapq
import math
from itertools import count
We’ll use heapq for the priority queue, math for square roots, and count() to break ties in the heap.
Step 2: Grid, start/goal, and neighbors
Define the grid and how to enumerate valid moves.
# 0 = free, 1 = obstacle
GRID = [
[0,0,0,0,0,0,0,0,1,0],
[0,1,1,0,0,0,0,0,1,0],
[0,0,0,0,1,0,1,0,0,0],
[0,1,0,0,1,0,0,0,1,0],
[0,1,0,0,0,0,1,0,0,0],
[0,0,0,1,1,0,0,0,0,0],
[0,1,0,0,0,0,1,1,1,0],
[0,0,0,0,1,0,0,0,0,0],
[1,1,0,0,0,1,0,1,0,0],
[0,0,0,1,0,0,0,0,0,0],
]
START = (0, 0)
GOAL = (9, 9)
# 8-connected moves: (dx, dy, cost)
MOVES = [
(-1, 0, 1.0), (1, 0, 1.0), (0, -1, 1.0), (0, 1, 1.0),
(-1, -1, math.sqrt(2)), (-1, 1, math.sqrt(2)),
( 1, -1, math.sqrt(2)), ( 1, 1, math.sqrt(2)),
]
H, W = len(GRID), len(GRID[0])
def in_bounds(x, y):
return 0 <= x < H and 0 <= y < W
def passable(x, y):
return GRID[x][y] == 0
def neighbors(x, y):
for dx, dy, cost in MOVES:
nx, ny = x + dx, y + dy
if in_bounds(nx, ny) and passable(nx, ny):
yield (nx, ny), cost
Defines the map, start/goal, and a generator to iterate over valid neighbors with movement costs.
Step 3: Heuristic (Octile distance)
Good for 8-connected grids.
def octile(a, b):
(x1, y1), (x2, y2) = a, b
dx, dy = abs(x1 - x2), abs(y1 - y2)
return (math.sqrt(2) - 1) * min(dx, dy) + max(dx, dy)
Admissible and typically tighter than Manhattan in 8-connected grids.
4. A core*
Open set (min-heap), g/f scores, came_from for path reconstruction, and a tie-breaker.
def astar(start, goal, hfn):
open_heap = []
tie = count()
g = {start: 0.0}
f = {start: hfn(start, goal)}
came_from = {}
heapq.heappush(open_heap, (f[start], next(tie), start))
open_set = {start}
closed_set = set()
while open_heap:
_, _, current = heapq.heappop(open_heap)
open_set.discard(current)
if current == goal:
# reconstruct
path = [current]
while current in came_from:
current = came_from[current]
path.append(current)
path.reverse()
return path, g[path[-1]]
closed_set.add(current)
cx, cy = current
for (nx, ny), step_cost in neighbors(cx, cy):
neigh = (nx, ny)
if neigh in closed_set:
continue
tentative_g = g[current] + step_cost
if tentative_g < g.get(neigh, float('inf')):
came_from[neigh] = current
g[neigh] = tentative_g
f[neigh] = tentative_g + hfn(neigh, goal)
if neigh not in open_set:
heapq.heappush(open_heap, (f[neigh], next(tie), neigh))
open_set.add(neigh)
return None, float('inf')
Classic A loop using a heap. Consistent heuristics guarantee that once a node is closed, its best path is fixed.*
5. Run and pretty-print
Overlay the path on the grid for clarity.
path, cost = astar(START, GOAL, octile)
# Render
grid_chars = [['#' if c==1 else '.' for c in row] for row in GRID]
if path:
for (x, y) in path:
if (x, y) not in (START, GOAL):
grid_chars[x][y] = '*'
sx, sy = START; gx, gy = GOAL
grid_chars[sx][sy] = 'S'; grid_chars[gx][gy] = 'G'
for row in grid_chars:
print(' '.join(row))
print(f"Path length (cost): {cost:.3f}")
Shows start S, goal G, obstacles #, free cells ., and the path *, with the precise path cost.
Quick Reference: Full Code
import heapq, math
from itertools import count
GRID = [
[0,0,0,0,0,0,0,0,1,0],
[0,1,1,0,0,0,0,0,1,0],
[0,0,0,0,1,0,1,0,0,0],
[0,1,0,0,1,0,0,0,1,0],
[0,1,0,0,0,0,1,0,0,0],
[0,0,0,1,1,0,0,0,0,0],
[0,1,0,0,0,0,1,1,1,0],
[0,0,0,0,1,0,0,0,0,0],
[1,1,0,0,0,1,0,1,0,0],
[0,0,0,1,0,0,0,0,0,0],
]
START, GOAL = (0,0), (9,9)
MOVES = [(-1,0,1.0),(1,0,1.0),(0,-1,1.0),(0,1,1.0),
(-1,-1,math.sqrt(2)),(-1,1,math.sqrt(2)),(1,-1,math.sqrt(2)),(1,1,math.sqrt(2))]
H, W = len(GRID), len(GRID[0])
def in_bounds(x,y): return 0<=x<H and 0<=y<W
def passable(x,y): return GRID[x][y]==0
def neighbors(x,y):
for dx,dy,c in MOVES:
nx, ny = x+dx, y+dy
if in_bounds(nx,ny) and passable(nx,ny):
yield (nx,ny), c
def octile(a,b):
(x1,y1),(x2,y2) = a,b
dx,dy = abs(x1-x2), abs(y1-y2)
return (math.sqrt(2)-1)*min(dx,dy) + max(dx,dy)
def astar(start, goal, hfn):
open_heap, tie = [], count()
g, f, came = {start:0.0}, {start:hfn(start,goal)}, {}
heapq.heappush(open_heap,(f[start], next(tie), start))
open_set, closed = {start}, set()
while open_heap:
_,_,cur = heapq.heappop(open_heap)
open_set.discard(cur)
if cur==goal:
path=[cur]
while cur in came:
cur=came[cur]; path.append(cur)
return list(reversed(path)), g[goal]
closed.add(cur)
cx,cy = cur
for (nx,ny), c in neighbors(cx,cy):
if (nx,ny) in closed: continue
tg = g[cur] + c
if tg < g.get((nx,ny), float('inf')):
came[(nx,ny)] = cur
g[(nx,ny)] = tg
f[(nx,ny)] = tg + hfn((nx,ny), goal)
if (nx,ny) not in open_set:
heapq.heappush(open_heap,(f[(nx,ny)], next(tie), (nx,ny)))
open_set.add((nx,ny))
return None, float('inf')
path, cost = astar(START, GOAL, octile)
chars = [['#' if c==1 else '.' for c in row] for row in GRID]
if path:
for x,y in path:
if (x,y) not in (START,GOAL): chars[x][y]='*'
sx,sy=START; gx,gy=GOAL
chars[sx][sy]='S'; chars[gx][gy]='G'
for row in chars: print(' '.join(row))
print(f"Path length (cost): {cost:.3f}")
Real‑World Application — Mini GPS on Small Road Graph
We’ll simulate a tiny road network using latitude/longitude coordinates. The heuristic will be great-circle distance (Haversine), which is admissible because roads cannot be straighter than the Earth’s surface line between two points.
Data Snapshot
A small directed graph with nodes (id → lat, lon) and weighted edges (approx road lengths in meters). Example (rough, illustrative coordinates around a city center):
Nodes (id: (lat, lon))
A: (14.5995, 120.9842)
B: (14.6030, 120.9880)
C: (14.6048, 120.9820)
D: (14.6065, 120.9900)
E: (14.6100, 120.9860)
Edges (u -> v : distance_m)
A->B: 550 A->C: 700
B->D: 450 B->E: 800
C->E: 600
D->E: 400 C->B: 650
Step 1: Imports and geo helpers
import heapq, math
from itertools import count
# Haversine distance in meters
R = 6371000.0 # Earth radius (m)
def haversine(p, q):
lat1, lon1 = map(math.radians, p)
lat2, lon2 = map(math.radians, q)
dlat = lat2 - lat1
dlon = lon2 - lon1
a = math.sin(dlat/2)**2 + math.cos(lat1)*math.cos(lat2)*math.sin(dlon/2)**2
c = 2 * math.atan2(math.sqrt(a), math.sqrt(1-a))
return R * c
Great-circle distance never overestimates true road distance ⇒ admissible heuristic.
Step 2: Graph definition
NODES = {
'A': (14.5995, 120.9842),
'B': (14.6030, 120.9880),
'C': (14.6048, 120.9820),
'D': (14.6065, 120.9900),
'E': (14.6100, 120.9860),
}
GRAPH = {
'A': {'B': 550, 'C': 700},
'B': {'D': 450, 'E': 800},
'C': {'E': 600, 'B': 650},
'D': {'E': 400},
'E': {},
}
Nodes include approximate lat/lon; edges store road distances in meters (directed for illustration).
Step 3: A* on a general graph with Haversine heuristic
def astar_graph(start, goal):
h = lambda n: haversine(NODES[n], NODES[goal])
open_heap, tie = [], count()
g, f, came = {start: 0.0}, {start: h(start)}, {}
heapq.heappush(open_heap, (f[start], next(tie), start))
open_set, closed = {start}, set()
while open_heap:
_, _, cur = heapq.heappop(open_heap)
open_set.discard(cur)
if cur == goal:
path = [cur]
while cur in came:
cur = came[cur]
path.append(cur)
path.reverse()
return path, g[goal]
closed.add(cur)
for nbr, w in GRAPH[cur].items():
if nbr in closed:
continue
tg = g[cur] + w
if tg < g.get(nbr, float('inf')):
came[nbr] = cur
g[nbr] = tg
f[nbr] = tg + h(nbr)
if nbr not in open_set:
heapq.heappush(open_heap, (f[nbr], next(tie), nbr))
open_set.add(nbr)
return None, float('inf')
Same A* structure; cost is edge length, heuristic is Haversine to the target node.*
Step 4: Run and print route
route, meters = astar_graph('A', 'E')
print(' → '.join(route))
print(f"Total length: {meters:.1f} m")
Outputs the best route and its computed length.
Quick Reference: Full GPS-like Code
import heapq, math
from itertools import count
R = 6371000.0
def haversine(p, q):
lat1, lon1 = map(math.radians, p)
lat2, lon2 = map(math.radians, q)
dlat, dlon = lat2-lat1, lon2-lon1
a = math.sin(dlat/2)**2 + math.cos(lat1)*math.cos(lat2)*math.sin(dlon/2)**2
return R * 2 * math.atan2(math.sqrt(a), math.sqrt(1-a))
NODES = {
'A': (14.5995, 120.9842),
'B': (14.6030, 120.9880),
'C': (14.6048, 120.9820),
'D': (14.6065, 120.9900),
'E': (14.6100, 120.9860),
}
GRAPH = {
'A': {'B': 550, 'C': 700},
'B': {'D': 450, 'E': 800},
'C': {'E': 600, 'B': 650},
'D': {'E': 400},
'E': {},
}
def astar_graph(start, goal):
h = lambda n: haversine(NODES[n], NODES[goal])
open_heap, tie = [], count()
g, f, came = {start:0.0}, {start:h(start)}, {}
heapq.heappush(open_heap,(f[start], next(tie), start))
open_set, closed = {start}, set()
while open_heap:
_,_,cur = heapq.heappop(open_heap)
open_set.discard(cur)
if cur==goal:
path=[cur]
while cur in came: cur=came[cur]; path.append(cur)
return list(reversed(path)), g[goal]
closed.add(cur)
for nbr, w in GRAPH[cur].items():
if nbr in closed: continue
tg = g[cur] + w
if tg < g.get(nbr, float('inf')):
came[nbr] = cur
g[nbr] = tg
f[nbr] = tg + h(nbr)
if nbr not in open_set:
heapq.heappush(open_heap,(f[nbr], next(tie), nbr))
open_set.add(nbr)
return None, float('inf')
route, meters = astar_graph('A','E')
print(' → '.join(route))
print(f"Total length: {meters:.1f} m")
Strengths & Limitations
Strengths
- Optimal with admissible, consistent heuristics and nonnegative edge costs.
- Fast in practice: prunes exploration with a good heuristic; widely used in real-time systems.
- General: works on grids, road networks, game maps, robot occupancy grids.
Limitations
- Memory-hungry: maintains open/closed sets; can be large on big maps.
- Heuristic design required: poor heuristics degrade into Dijkstra-like behavior.
- Dynamic changes: vanilla A* recomputes from scratch when the map changes (use D* Lite or similar for dynamic environments).
Final Notes
You implemented A* twice: first on a grid using an octile heuristic, then on a geo-graph using the Haversine heuristic.
You learned how admissibility and consistency guarantee optimality and how to engineer performant A* with heaps, tie-breaking, and clear data structures. These patterns transfer directly to robotics navigation, games, and routing services.
Next Steps for You:
Acceleration techniques: Try Jump Point Search (for uniform-cost grids) and bidirectional A* to reduce expansions.
Dynamic replanning: Explore D*, D Lite*, or LPA* for environments where edges change or costs update online.
Any-angle paths: Implement Theta* to remove grid-induced zigzags.
Scale up with real data: Load a neighborhood from OpenStreetMap (e.g., via osmnx), run A*, and compare routes to your maps app.
References
[1] P. E. Hart, N. J. Nilsson, and B. Raphael, “A Formal Basis for the Heuristic Determination of Minimum Cost Paths,” IEEE Trans. Systems Science and Cybernetics, vol. 4, no. 2, pp. 100–107, 1968.
[2] E. W. Dijkstra, “A Note on Two Problems in Connexion with Graphs,” Numerische Mathematik, vol. 1, pp. 269–271, 1959.
[3] J. Pearl, Heuristics: Intelligent Search Strategies for Computer Problem Solving. Addison-Wesley, 1984.
[4] S. J. Russell and P. Norvig, Artificial Intelligence: A Modern Approach, 3rd ed. Prentice Hall, 2010.
[5] R. E. Korf, “Depth-First Iterative-Deepening: An Optimal Admissible Tree Search,” Artificial Intelligence, vol. 27, no. 1, pp. 97–109, 1985. (See also IDA* variants.)
[6] S. Koenig and M. Likhachev, “D* Lite,” in Proceedings of AAAI, 2002, pp. 476–483.
[7] A. Nash, K. Daniel, S. Koenig, and A. Felner, “Theta*: Any-Angle Path Planning on Grids,” in AAAI, 2007, pp. 1177–1183.
[8] D. Harabor and A. Grastien, “Online Graph Pruning for Pathfinding on Grid Maps,” in AAAI, 2011. (Jump Point Search.)
[9] I. Pohl, “Heuristic Search Viewed as Path Finding in a Graph,” Artificial Intelligence, vol. 1, no. 3–4, pp. 193–204, 1970. (Weighted A*.)

Leave a comment